Every doctor’s goal is to save lives. Every lawyer’s goal is to keep the bad guys off the streets and every teacher’s goal is to empower the youth. But every engineer’s goal is to build an iron man suit!
These are just some of the projects I’ve done during my university career.
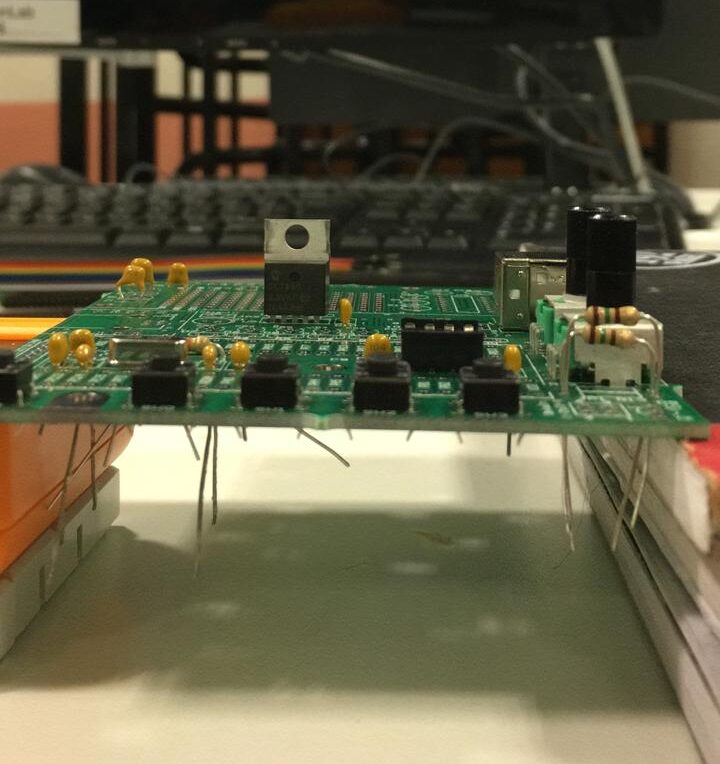
Assembling and Coding of STM32F0 Microcontroller
Embedded Systems I
Spending hours in the lab following a step by step tutorial and still blowing up a few components was all worth it when microcontroller turned on and worked as expected.
Used the microcontroller throughout the semester for various labs and coded it to perform various tasks. The microcontroller was also used for other courses later on in my university career. I used it to generate PWM signals for a lab in a Power Electronics course.
Previous
Next
Previous
Next
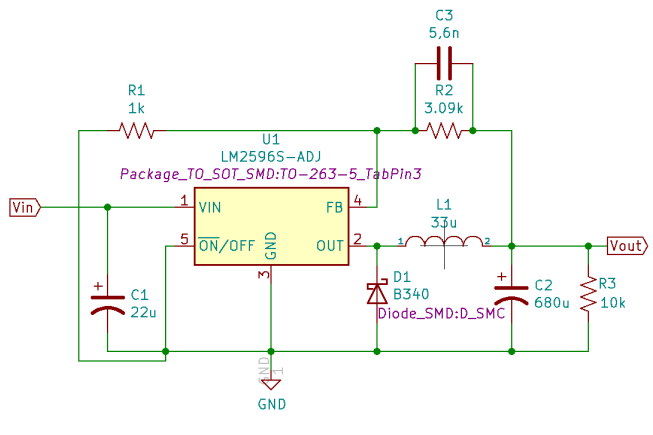
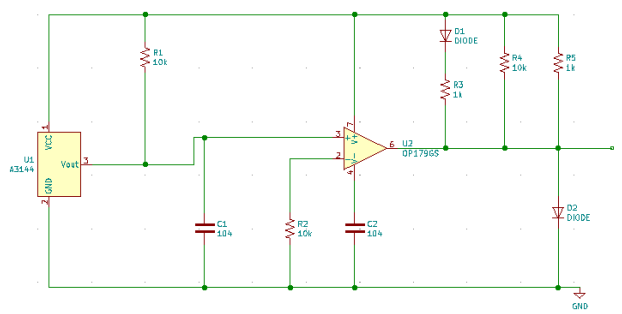
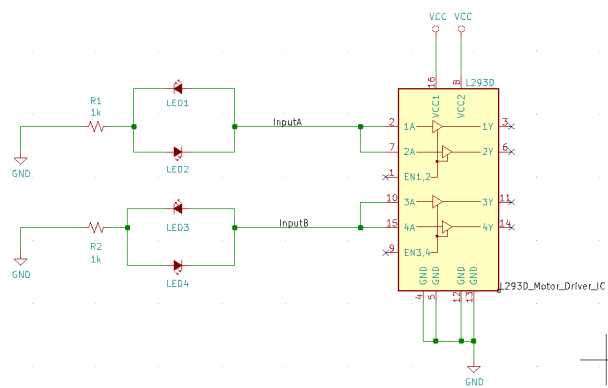
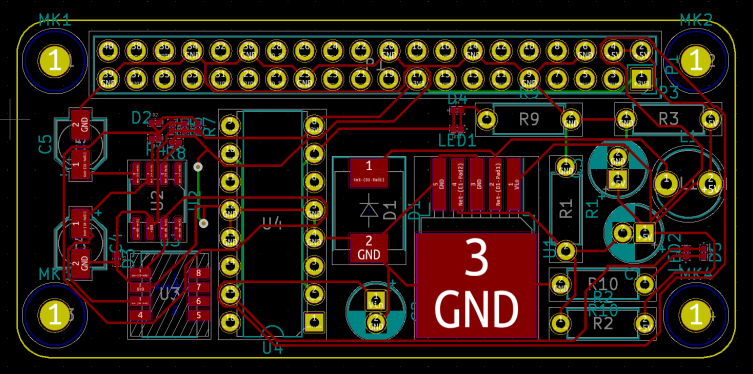
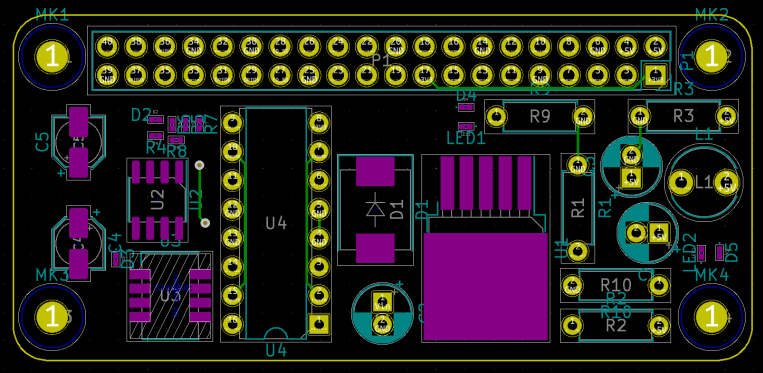
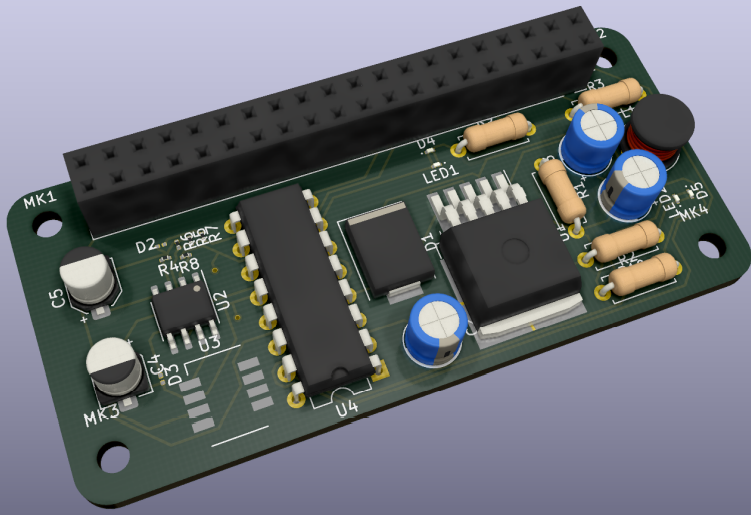
Design of a PCB for a motor driver
Engineering Design Principles
We were given a task to design a PCB for a motor driver that can be used dynamically. While the project did not have a practical component due to the shortage of microcontrollers after the COVID-19 global pandemic, we still had to work as if our design were to be sent in for production.
Previous
Next
Line following robot
Mechatronics design
This was easily the most difficult project to date. We were given access to a robot and had to make it solve a maze and then redo the the maze using the most efficient route. As tough as it was to get the simulations to learn the maze and store the most efficient route, that was not even a challenge compared to trying to figure out why the simulation would solve the maze but the robot would just be doing donuts in real life.
Countless nights were spent in EM7 with a makeshift maze and two or three robots and several of us debugging every issue we faced one by one. Unfortunately, in the end only two groups got their robot to solve the maze and ours was not one of them.
None the less, it was an amazing experience and gave us insight into how things are not always as black and white as they seem.
Navigating the maze
Below you can see the robot learning the maze using the left-turn algorithm. The algorithm tells the robot to take a left turn if it detects one and continue until a dead end. It will then go back to the last junction and apply the same algorithm. This continues until the robot gets to the end of the maze.
Solving the maze
As the robot progresses through the maze, it stores the turns it takes that have a successful outcome. Once it reaches the end of the maze, it is ready to do the maze again and run through it by taking the most efficient route.
Previous
Next
Design of OppieCop: A device that monitors your machines health
Engineering systems design
We were tasked to go out and find a small business owner who had a problem and work together to come up with a solution. Sam is a carpenter with a small business. He needs his machines to be working optimally at all times to maximise profits. As a group we created a device that would monitor all aspects of the Mac Afric 381 machine. Our device would monitor the air quality in and around the machine to see if there are any issues that cannot be detected by inspection.
I was in charge of creating a protective housing for the device. Using Shapr3D, I modeled a sleek but strong housing with enough space for all the components and the 7″ LCD screen. I chose to make the housing out of Acrylonitrile Butadiene Styrene as it’s an industry standard and proven to be strong enough for the working environment. The main goal of this project was the report as it was necessary to have it as accurate and as professional as possible. We were asked to make the report such that if it were to be sent to the manufacturers, they would have no issues with it and begin production.
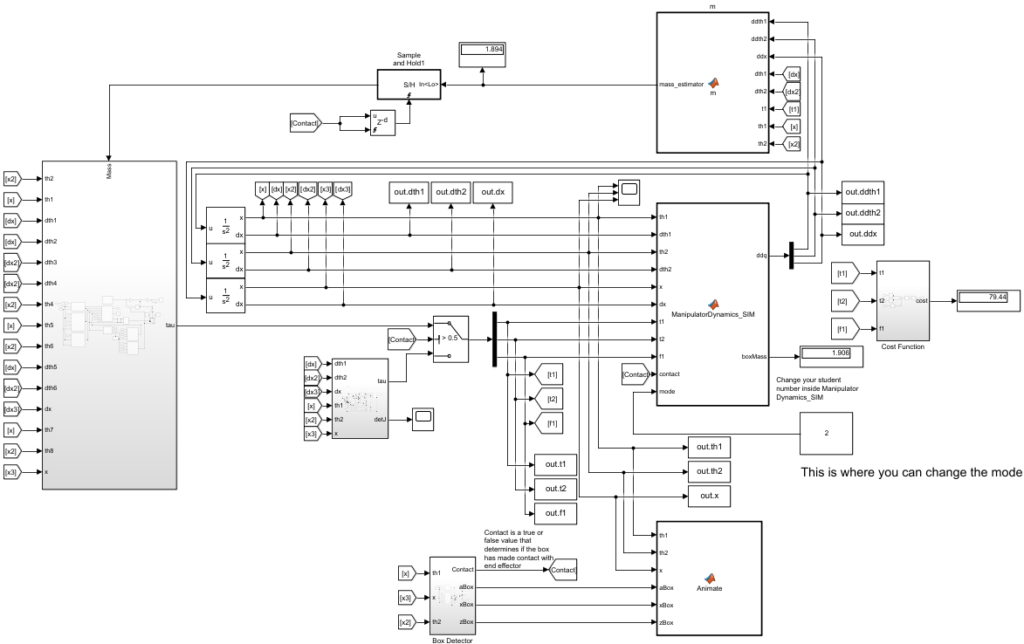
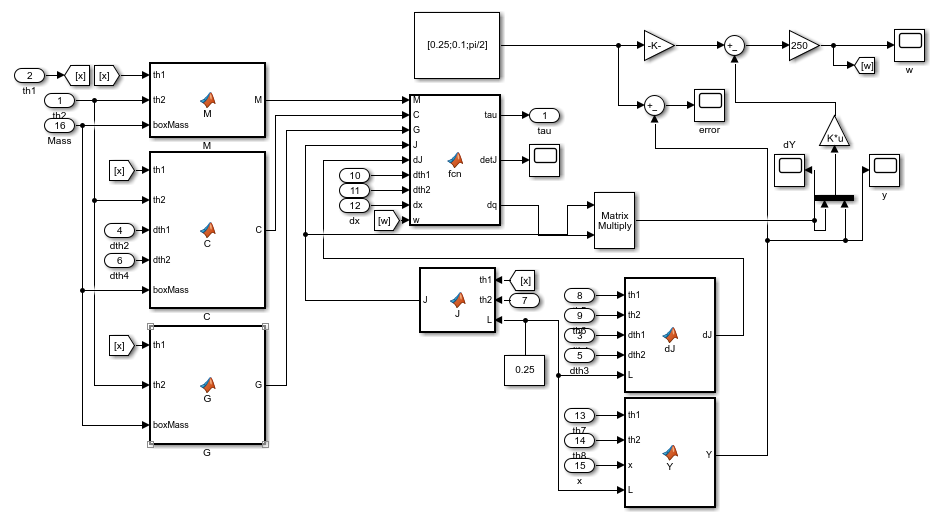
The aim of this project was to simulate a warehouse organizing robot. The role of this robot is to transfer packages throughout the warehouse. The robot is made up of two links, with the end-effector having suction cups and a sensor for detecting package contact. The opposite end is connected to a base box, which can only move in the x-direction due to its fixed attachment to a rail.
This project also required a lot of debugging and patience because of how unstable MATLAB can be at times. But, in the end, seeing the simulation of the robot arm picking up a box and detecting its weight and then moving the box to the desired position without dropping was worth all the hassle.
Previous
Next
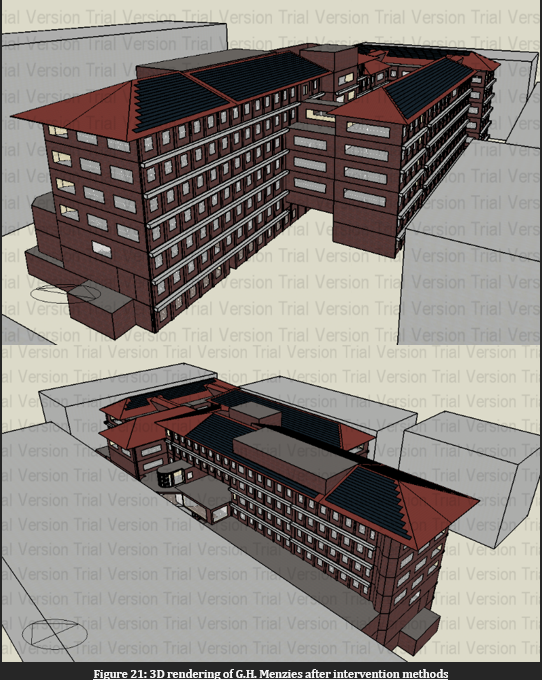
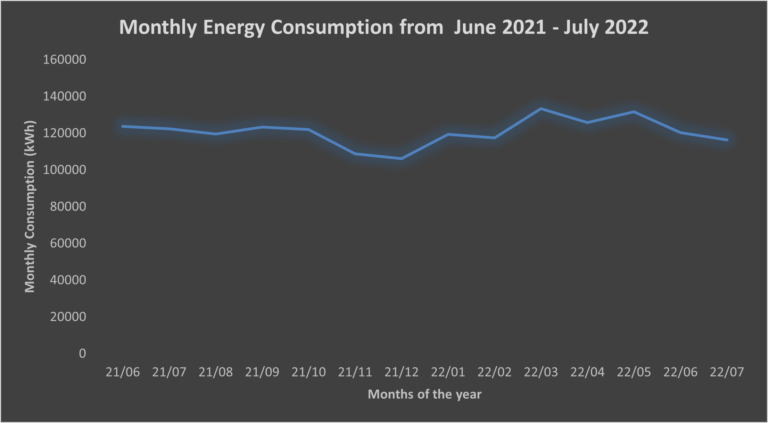
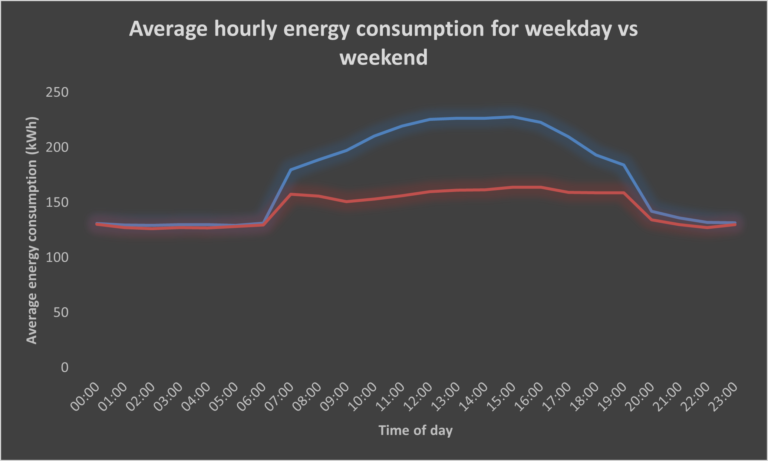
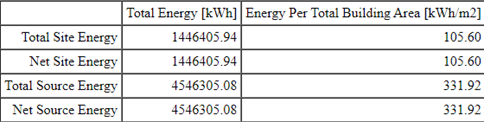
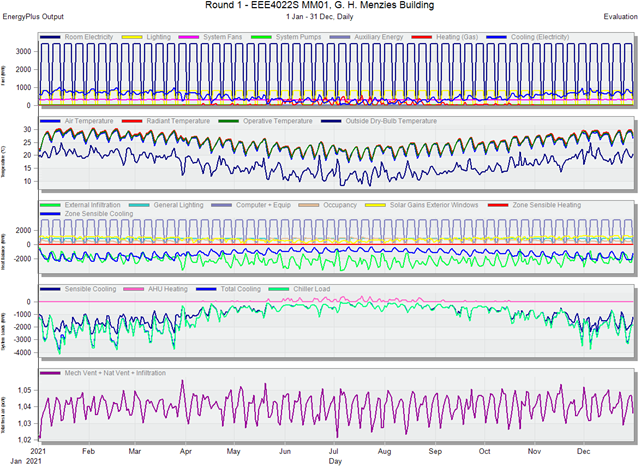
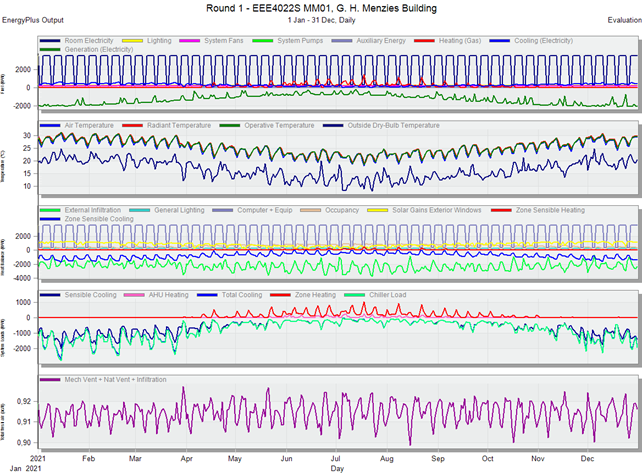
Investigation of building energy
consumption and the effect of energy efficient interventions in a commercial building
thesis
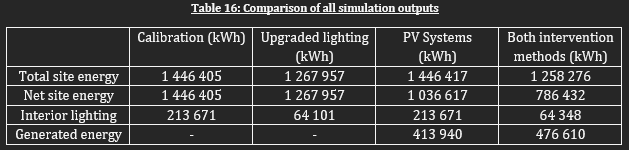
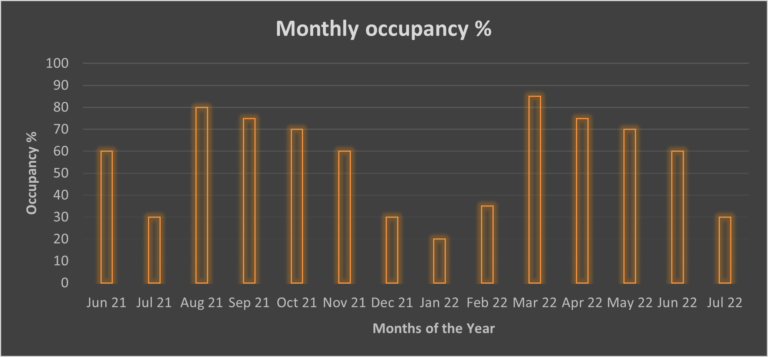
Globally there has been a transition into the use of more renewable energy sources and the development of new climate conscious infrastructure. A cost-effective and realistic path that can be taken in South Africa to fast track this transition is research on the ways in which existing infrastructure can be adapted to be more energy efficient. This research aimed to find interventions that would significantly lower the energy consumption in an existing commercial building, namely G. H. Menzies- a commonly used engineering building, on the upper campus of the University of Cape Town. Data was collected through a building audit, building plans from Properties and Services Department at UCT and current energy consumption readings (from June 2021 to July 2022) in the Menzies building presented in an excel sheet supplied by the Department of Sustainability at UCT. Based off this data, two interventions were proposed to lower consumption. These suggested interventions were an upgraded lighting system and the installation of PV systems. Simulations were run, using DesignBuilder and EnergyPlus, for each intervention method. Each intervention was first implemented separately, to identify individual impact, and then together to see overall impact. The results showed that the two chosen intervention methods together decreased the overall energy consumption in the G. H. Menzies building by up to 46%.